
Cientistas Chineses Desenvolvem Robôs “Centauro” que Amplificam a Capacidade Humana de Caminhada e Transporte
Uma equipe de cientistas chineses está na vanguarda da inovação em robótica com o desenvolvimento de um impressionante robô “centauro”. Essa tecnologia promissora visa fundir a inteligência e a agilidade humana com a força e a resistência de pernas robóticas independentes. O objetivo principal é auxiliar humanos em atividades que demandam esforço físico, como a caminhada e o transporte de cargas pesadas, abrindo novas possibilidades para diversas indústrias e para o cotidiano.
A pesquisa, detalhada em publicações científicas, descreve um sistema complexo onde o corpo humano se integra a um exoesqueleto robótico. Essa fusão cria um “sistema quadrúpede Humano-Centauro”, projetado para otimizar a distribuição de peso e fornecer um impulso adicional para a locomoção. O desenvolvimento representa um passo significativo na colaboração entre humanos e máquinas, buscando superar as limitações físicas humanas em cenários específicos.
Os resultados preliminares indicam que essa tecnologia tem o potencial de revolucionar a forma como lidamos com tarefas que exigem força e resistência, como logística, construção e até mesmo em operações de resgate. A capacidade de adaptar-se a diferentes velocidades e direções de caminhada humana, aliada a um controle de força preciso, sugere um futuro onde a colaboração homem-máquina será ainda mais intrínseca e eficiente, conforme divulgado pelos pesquisadores envolvidos no projeto.
A Arquitetura do Robô Centauro: Uma Fusão de Biologia e Mecânica
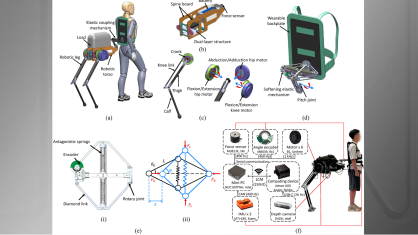
A estrutura do robô centauro é composta por elementos cuidadosamente projetados para garantir uma integração harmoniosa e funcional com o corpo humano. Essencialmente, o sistema consiste em duas pernas robóticas independentes, cada uma equipada com três graus de liberdade. Essa configuração permite uma ampla gama de movimentos, simulando a flexibilidade das pernas humanas e adaptando-se a diferentes tipos de terreno e inclinações.
Um torso robótico complementa as pernas, atuando como um ponto de conexão e suporte. O acoplamento entre o humano e o robô é realizado através de um mecanismo elástico passivo de amortecimento. Este componente é crucial, pois permite que o sistema absorva choques e vibrações, proporcionando uma experiência de caminhada mais suave e confortável para o usuário. Além disso, o mecanismo elástico facilita o desacoplamento dinâmico do sistema Humano-Centauro, permitindo que o robô seja modelado e controlado de forma independente, mesmo quando integrado ao humano.
Essa configuração quadrúpede, com o humano no centro, otimiza a distribuição vertical da carga, aliviando o estresse sobre o corpo humano. Mais notavelmente, o robô fornece força horizontal para frente, atuando diretamente através do centro de massa do humano. Isso resulta em um impulso adicional que auxilia significativamente na caminhada, especialmente em terrenos irregulares ou ao carregar peso.
Estratégias de Controle Avançadas para Locomoção e Interação
O controle coordenado do robô centauro é um dos pilares da sua funcionalidade. Para alcançar a sincronia perfeita entre a locomoção humana e a assistência robótica, os cientistas desenvolveram uma nova estratégia de controle de locomoção-intera��ão. Esta abordagem visa garantir que as ações do robô complementem, em vez de interferir, os movimentos naturais do usuário.
Um dos desafios na robótica de exoesqueletos é a adaptação a diferentes ambientes. Para superar isso, foi criado um controlador de perna oscilante adaptativo ao terreno. Este controlador é capaz de analisar o tipo de superfície e, com base nessa informação, gerar uma trajetória de balanço específica para cada perna, otimizando a estabilidade e a eficiência da caminhada. Seja em superfícies planas, inclinadas ou irregulares, o robô ajusta seus movimentos para garantir uma transição suave.
O modelo de interação baseado em complacência, viabilizado pelo mecanismo elástico, permite que o sistema responda de forma flexível às forças geradas pelo humano e pelo ambiente. Isso significa que o robô não é rígido, mas sim capaz de ceder e se ajustar, tornando a colaboração mais intuitiva e segura. Essa capacidade de adaptação é fundamental para que o sistema Humano-Centauro possa ser modelado e controlado de maneira eficaz, mesmo em situações dinâmicas.
Resultados Experimentais: Eficácia e Adaptação Comprovadas
Os testes experimentais realizados com o robô centauro demonstraram resultados promissores em diversas frentes. Uma das constatações mais importantes é a efetiva adaptação do robô às diferentes direções e velocidades de caminhada humana. Isso indica que o sistema é capaz de “aprender” e responder aos comandos implícitos do usuário, proporcionando uma experiência de uso intuitiva e natural.
A colaboração entre o humano e o robô foi explicitamente testada em travessias de terrenos variados. Os resultados mostraram que o sistema Humano-Centauro conseguiu navegar por esses obstáculos com sucesso, indicando a robustez do controlador de perna oscilante adaptativo ao terreno. Essa capacidade é crucial para aplicações em campo, onde as condições do solo podem ser imprevisíveis.
No que diz respeito ao transporte de carga, o robô centauro apresentou um desempenho notável. Em experimentos onde foi carregada uma carga de 20 kg, o sistema alcançou uma taxa de compartilhamento de carga significativa, o que significa que o robô assumiu uma porção considerável do peso. Isso resultou em uma redução do custo metabólico para o humano e uma melhora na estabilidade lateral da marcha, comparado ao uso de uma mochila convencional. Esses dados quantitativos validam o potencial do robô centauro em aliviar a carga física em tarefas de transporte.
Potenciais Aplicações e Impacto Futuro do Robô Centauro
As implicações do desenvolvimento do robô centauro são vastas e podem impactar positivamente diversas áreas. Na logística e no varejo, por exemplo, trabalhadores poderiam transportar cargas mais pesadas por longas distâncias com menos esforço, aumentando a produtividade e reduzindo o risco de lesões. Em cenários de construção e manufatura, o robô poderia auxiliar no transporte de materiais pesados em canteiros de obras ou linhas de produção, otimizando o fluxo de trabalho.
Em operações de busca e salvamento, equipes poderiam se beneficiar da capacidade de atravessar terrenos difíceis e transportar equipamentos ou suprimentos essenciais com maior facilidade e segurança. Para indivíduos com mobilidade reduzida ou que necessitam de assistência para locomoção, o robô centauro pode representar um avanço significativo em termos de independência e qualidade de vida, embora esta aplicação específica possa exigir desenvolvimentos adicionais focados na reabilitação.
A tecnologia também abre portas para a exploração em ambientes hostis, como em missões espaciais ou em zonas de desastre, onde a força e a resistência robótica combinadas com a inteligência humana seriam inestimáveis. A capacidade de adaptar-se a diferentes velocidades e direções de marcha, juntamente com a eficiência no transporte de carga, sugere que o robô centauro é mais do que um protótipo; é um vislumbre de um futuro onde a colaboração homem-máquina redefine os limites do que é fisicamente possível.
Desafios e Próximos Passos na Evolução dos Robôs Centauros
Apesar do sucesso demonstrado nos experimentos, a jornada para a adoção generalizada do robô centauro ainda apresenta desafios. Um dos principais aspectos a serem aprimorados é a redução do peso e do volume do exoesqueleto, tornando-o mais prático e confortável para uso prolongado. A integração de sensores mais sofisticados para a detecção do ambiente e a intenção do usuário também pode levar a uma interação ainda mais fluida.
A autonomia energética é outro ponto crucial. Atualmente, sistemas robóticos complexos demandam fontes de energia robustas e de longa duração. Pesquisas em baterias mais eficientes ou métodos alternativos de recarga serão essenciais para aumentar o tempo de operação contínua do robô centauro em campo.
A segurança, embora tenha sido um foco no design do mecanismo de amortecimento, continuará sendo uma prioridade. Garantir que o sistema possa operar de forma segura em todas as condições e responder adequadamente a falhas potenciais é fundamental para a confiança do usuário e para a viabilidade comercial. Os próximos passos provavelmente envolverão testes em larga escala em cenários reais, refinamento contínuo dos algoritmos de controle e a exploração de parcerias industriais para levar essa tecnologia promissora do laboratório para o mercado.